16.2 S4 versus S3
Once you’ve mastered S3, S4 is not too difficult to pick up: the underlying ideas are the same, S4 is just more formal, more strict, and more verbose. The strictness and formality of S4 make it well suited for large teams. Since more structure is provided by the system itself, there is less need for convention, and new contributors don’t need as much training. S4 tends to require more upfront design than S3, and this investment is more likely to pay off on larger projects where greater resources are available.
One large team effort where S4 is used to good effect is Bioconductor. Bioconductor is similar to CRAN: it’s a way of sharing packages amongst a wider audience. Bioconductor is smaller than CRAN (~1,300 versus ~10,000 packages, July 2017) and the packages tend to be more tightly integrated because of the shared domain and because Bioconductor has a stricter review process. Bioconductor packages are not required to use S4, but most will because the key data structures (e.g. SummarizedExperiment, IRanges, DNAStringSet) are built using S4.
S4 is also a good fit for complex systems of interrelated objects, and it’s possible to minimise code duplication through careful implementation of methods. The best example of such a system is the Matrix package (Bates and Maechler 2018). It is designed to efficiently store and compute with many different types of sparse and dense matrices. As of version 1.2.18, it defines 102 classes, 21 generic functions, and 1998 methods, and to give you some idea of the complexity, a small subset of the class graph is shown in Figure 16.1.
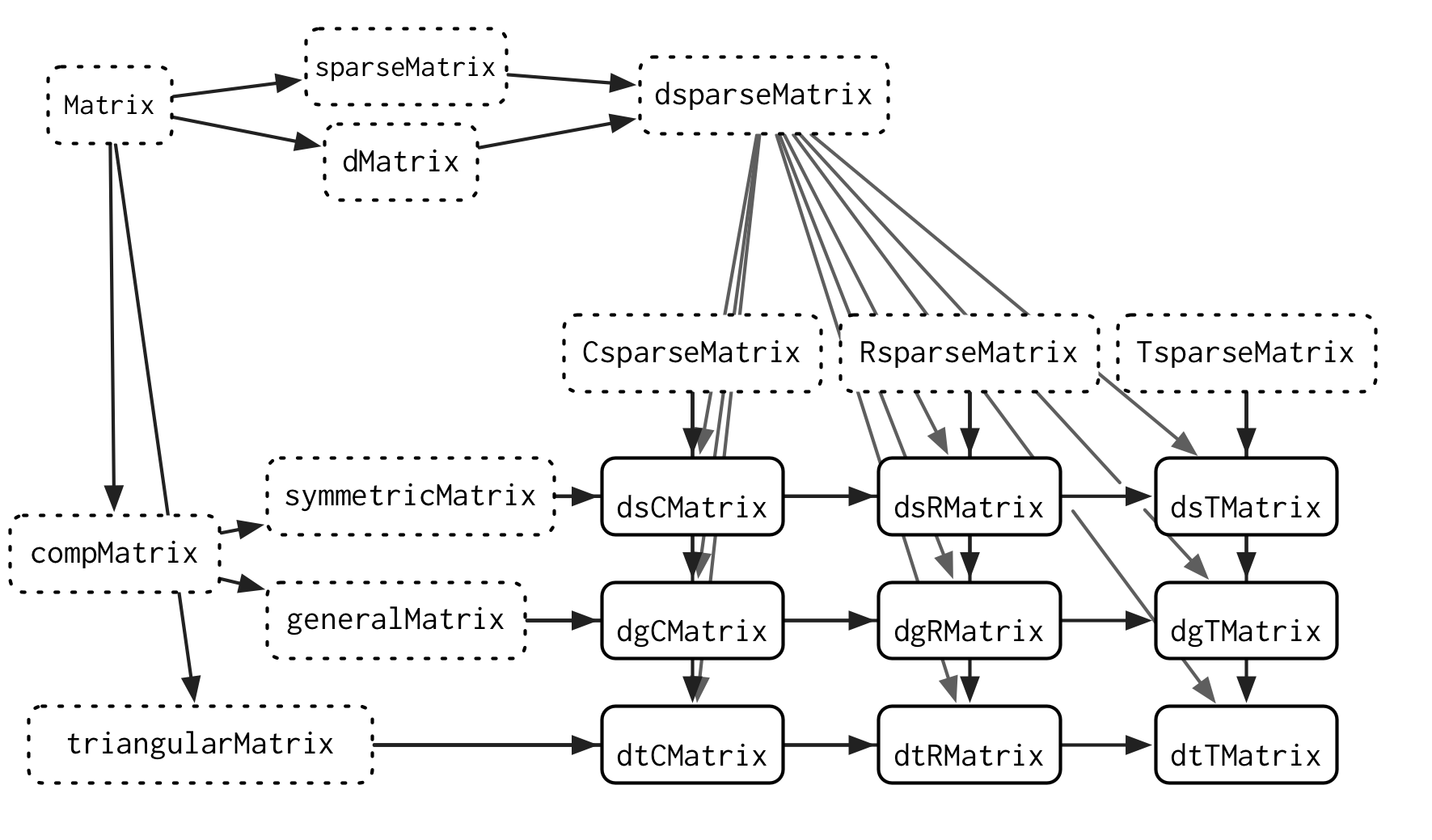
Figure 16.1: A small subset of the Matrix class graph showing the inheritance of sparse matrices. Each concrete class inherits from two virtual parents: one that describes how the data is stored (C = column oriented, R = row oriented, T = tagged) and one that describes any restriction on the matrix (s = symmetric, t = triangle, g = general).
This domain is a good fit for S4 because there are often computational shortcuts for specific combinations of sparse matrices. S4 makes it easy to provide a general method that works for all inputs, and then provide more specialised methods where the inputs allow a more efficient implementation. This requires careful planning to avoid method dispatch ambiguity, but the planning pays off with higher performance.
The biggest challenge to using S4 is the combination of increased complexity and absence of a single source of documentation. S4 is a complex system and it can be challenging to use effectively in practice. This wouldn’t be such a problem if S4 documentation wasn’t scattered through R documentation, books, and websites. S4 needs a book length treatment, but that book does not (yet) exist. (The documentation for S3 is no better, but the lack is less painful because S3 is much simpler.)
References
Bates, Douglas, and Martin Maechler. 2018. “Matrix: Sparse and Dense Matrix Classes and Methods.” https://CRAN.R-project.org/package=Matrix.